Field weakening
Every EUC motor has a speed ceiling. Not from firmware limits or tiltback - from physics. The motor generates a voltage that fights the battery voltage, and at some point, the battery can’t push harder. Field weakening is how the controller cheats past that ceiling. It works. It also shrinks your safety margin in ways most riders don’t understand.
The physics: back-EMF
A spinning motor is also a generator. As the rotor turns, the permanent magnets sweep past the stator windings and induce a voltage - back-EMF (electromotive force). The faster the rotor spins, the higher the back-EMF climbs.
Here’s the problem: the controller can only push current into the motor when the supply voltage (from the battery) exceeds the back-EMF. At low speed, back-EMF is small - the controller has plenty of voltage headroom to drive current and produce torque. As speed increases, back-EMF rises. The gap between battery voltage and back-EMF narrows. Less gap means less ability to push current, which means less available torque.
At some speed - the base speed - back-EMF equals the battery voltage. The controller can’t push any more current through the windings using conventional drive. The motor has hit its natural speed limit. Without intervention, that’s it. You’re at maximum RPM for that voltage.
How field weakening works
The controller has one more trick. Instead of trying to force more voltage, it injects a current component that partially cancels the magnetic field of the permanent magnets. Less magnetic field means less back-EMF per RPM. Less back-EMF means the motor can spin faster before hitting the voltage ceiling.
The trade: you reduced the magnetic field. Torque is proportional to magnetic field strength × current. With a weakened field, the same current produces less torque. You gained speed. You lost torque reserve. That’s the fundamental trade-off of field weakening - always.
In practice, the controller transitions smoothly. Below base speed, it runs in constant-torque mode - full field, maximum torque available. Above base speed, it enters field-weakened mode - constant power, rising speed, falling torque. The motor doesn’t suddenly switch. The controller gradually increases the field-weakening current as speed climbs.
Why motor type matters: PMSM vs IPMSM
Not all motors can do field weakening effectively.
Surface-mount PMSM (Surface Permanent Magnet Synchronous Motor): magnets are glued to the outside of the rotor, directly facing the air gap. The magnetic flux path is fixed. The controller can attempt field weakening, but the magnets resist - their flux is hard to redirect. The result is limited speed extension and high current draw for minimal benefit. Risk of demagnetizing the magnets at high temperatures.
Interior PMSM (IPMSM): magnets are embedded inside the rotor, surrounded by steel. This creates two sources of torque - magnet torque (like PMSM) and reluctance torque (from the geometry of the rotor). The embedded position allows the controller to manipulate flux paths more effectively. Field weakening works well. Speed extension is meaningful. Most modern high-performance EUC motors use this architecture.
The difference matters for riders: an IPMSM motor on field weakening gives you usable speed extension with manageable current increases. A surface-mount PMSM on field weakening gives you marginal gains at high thermal cost. If your wheel’s motor is designed for field weakening (most 2024+ performance wheels are), the firmware can use it safely within limits.
What happens to your safety margin
This is the part that matters for staying on the wheel.
At base speed (no field weakening), the motor has full torque available. If you hit a bump, the controller can instantly dump current to correct. If wind pushes you, there’s headroom. If you lean hard, the motor responds.
In field-weakened range, every one of those corrections is weaker. The motor is already working to maintain speed with a weakened field. The torque it can produce for corrections is reduced - sometimes dramatically at high field-weakening levels.
This is where overlean happens most. You’re riding at a speed that feels normal. The wheel isn’t beeping (the alarm is set to a fixed speed, not a field-weakening percentage). But the torque reserve - the gap between what the motor is delivering and what it could deliver - is shrinking with every km/h above base speed.
A bump at 40 km/h (25 mph) with full field: the motor corrects instantly, you don’t notice. The same bump at 70 km/h (43 mph) in deep field weakening: the motor tries to correct but doesn’t have the torque headroom. The pedals dip. If the demand exceeds what’s available, you overlean.
The current cost
Field weakening isn’t free energy. The field-weakening current doesn’t directly produce useful torque - it’s spent fighting the permanent magnets. This means:
Higher total current draw. The motor draws more amps at field-weakened speeds than it would at the same speed if it had a higher base speed (from a higher-voltage system). This is why 168V wheels can cruise at the same speed as 134V wheels with less field weakening and less heat.
More heat. Current through copper produces heat (I²R losses). More current means more heat in the windings, MOSFETs, and wiring. Sustained field-weakened riding pushes thermal limits faster than riding at the same power below base speed.
Battery sag amplification. At high current draw, battery voltage sags more. Voltage sag reduces the available headroom for the controller. The field weakening is fighting two things simultaneously - back-EMF and voltage sag. At low battery, this compounds dangerously.
Field weakening and regenerative braking
An important but rarely discussed effect: field weakening changes braking behavior.
When you brake in field-weakened range, the controller reverses the current flow to generate braking torque. But the weakened field means the motor generates less back-EMF per RPM. The controller needs to re-strengthen the field to produce effective regenerative braking. This transition - from field-weakened motoring to strengthened braking - happens in the firmware and affects how braking feels.
Some riders report that braking from high field-weakened speeds feels different - either stronger than expected (the field snaps back to full strength, suddenly producing more regen force) or inconsistent (the firmware manages the transition imperfectly). This is a firmware tuning issue, not a hardware limitation. Good firmware handles it smoothly. Not all firmware is good.
Voltage: the real speed lever
Field weakening exists because of a voltage constraint. Higher battery voltage raises the base speed - the point where field weakening kicks in. This is why the industry moved from 84V to 100V to 126V to 134V to 151V to 168V to 176V. Each voltage jump buys speed the honest way - with headroom intact.
A 134V wheel doing 80 km/h (50 mph) might be deep in field weakening. A 176V wheel at the same 80 km/h (50 mph) might still be below base speed, with full torque available. Same rider, same speed, vastly different safety margins. This is why higher voltage isn’t just marketing - it’s physics-backed safety.
The practical implication: when comparing wheels at similar top speeds, the higher-voltage wheel will generally have more torque reserve at cruising speed. A 151V Lynx at 75 km/h (47 mph) has more safety margin than a 126V S22 at 75 km/h (47 mph), all else being equal, because the Lynx is using less field weakening to reach that speed.
How to know you’re in field weakening
Most EUC apps don’t explicitly show “field weakening active.” But you can infer it:
High PWM at high speed. If EUC World shows 70%+ PWM at your cruising speed, you’re likely in field-weakened range. The controller is working hard.
Reduced torque feel. If you notice that acceleration feels weaker at higher speeds compared to the same power demand at lower speeds - that’s the field weakening effect. The motor has less to give.
Battery percentage matters more. At high field-weakening speeds, voltage sag from low battery hits harder. A speed that felt safe at 80% battery might trigger beeps at 50% - because the reduced voltage pushes you deeper into field weakening.
For a method to map your wheel’s own curve, see how to find your real safe cruise speed.
Firmware and field weakening tuning
The controller firmware decides how aggressively to use field weakening. Some observations from the EUC community:
Begode allows field weakening tuning in the app (off-road mode vs racing mode, FW values 0-10). Higher values enable more speed extension but reduce torque reserve. Off-road mode without field weakening keeps you in constant-torque range - maximum response, lower top speed. Racing mode with high FW values pushes the speed ceiling but thins the safety net.
Inmotion handles field weakening internally - no user-facing control. The firmware manages the transition based on speed, battery state, and temperature. The rider doesn’t choose - the firmware does.
KingSong and LeaperKim fall somewhere in between, with some modes affecting how aggressively field weakening engages.
The 555 recommendation from our range article applies here: 0-40 km/h (0-25 mph) city or hills, off-road mode without field weakening. 0-60 km/h (0-37 mph) with responsive braking, off-road mode with moderate field weakening. 60+ km/h regularly, racing mode with high field weakening - but understand you’re trading margin for speed.
Case study: FW crossover measured on a 168V wheel
All of the above is physics and firmware theory. Here is what it looks like in actual ride data - six runs of the same 3.2 km loop, cycling through every mode × FW combination on the same afternoon.
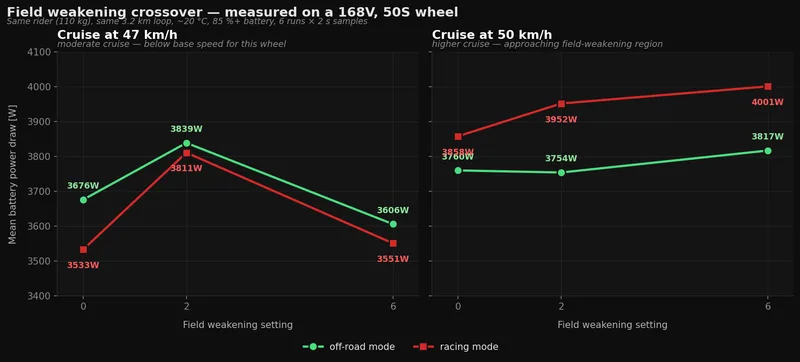
Setup: Extreme Bull Commander GT Pro+ (168 V full, 40S × 6P Samsung 50S, 4400 Wh claimed / ~4320 Wh real). 110 kg (243 lbs) rider, ~20°C (68°F) ambient, 85%+ battery, urban asphalt with traffic stops, 2-second samples logged via EUC World. The same rider rode the same loop six times in a row, changing only mode (off-road vs racing) and field weakening (FW0, FW2, FW6). All other conditions held constant.
Two cruise windows were isolated from each log: sustained samples at 45-50 km/h (28-31 mph) - moderate cruise, well below base speed for this wheel - and 48-53 km/h (30-33 mph) - higher cruise, approaching the field-weakening transition.
What the data shows
At 47 km/h (29 mph) - left panel - mode efficiency is flipped from what marketing would predict. Racing mode - the “aggressive” setting - is actually more efficient at this cruise speed than off-road across every FW setting. Racing FW0 (3533 W) is the lowest power draw in the whole test. Off-road FW0 costs ~140 W more for the same speed. This is not free - racing mode still generated higher peak currents during acceleration spikes - but at sustained cruise, the smoother throttle response uses less energy than off-road’s conservative pedal algorithm.
At 47 km/h, FW2 is a trap in both modes. Off-road FW2 (3839 W) draws ~230 W more than off-road FW6 (3606 W). Racing FW2 (3811 W) draws ~280 W more than racing FW6 (3551 W). The shape is identical: local maximum at FW2, lower at both FW0 and FW6. Why? FW2 commits the controller to running field-weakening current before the motor actually needs it. At 47 km/h on this 168V wheel, back-EMF hasn’t caught up to battery voltage yet - there’s no voltage ceiling to fight. The FW current is waste heat.
At 50 km/h (31 mph) - right panel - the picture changes completely. Off-road mode is nearly flat across FW settings (3754-3817 W, a 63 W spread). Racing mode climbs monotonically with FW (3858 → 3952 → 4001 W, a 143 W spread). And the mode comparison flips: off-road is now the more efficient choice at every FW setting.
This is the crossover. At 47 km/h, below base speed, racing wins and FW hurts. At 50 km/h, approaching base speed, off-road wins and racing’s aggressive FW tuning turns into overhead.
Peak current told the same story
The peak current draw across the full six runs ranged from 35.1 A (off-road FW6) to 43.4 A (racing FW2) - a 23% spread from the same rider on the same road. Racing FW2 hit the highest peak every time acceleration was demanded. That’s 7.2 A per cell on this 6P Samsung 50S pack - under 30% of the 25 A continuous per-cell rating, so not a safety concern on this wheel. But it illustrates how mode and FW settings compound: aggressive mode + inefficient FW region = highest cell stress.
What this means beyond this specific wheel
Your numbers will differ. A 134V wheel has a lower base speed, so the crossover probably sits 5-8 km/h lower - closer to 40 km/h (25 mph). A heavier rider shifts it further down (more current draw at the same speed pushes the motor into field-weakening sooner). A lower state of charge does the same. A 176V wheel pushes the crossover up.
What generalizes:
- There is always a crossover. FW settings have a region where they help and a region where they hurt. Below base speed, non-zero FW is pure overhead. Above base speed, the benefit depends on how aggressively the firmware uses it
- Mode efficiency is speed-dependent. Racing isn’t universally “more efficient” or “less efficient” than off-road. It depends on whether you’re cruising below or above the point where the controller’s aggressive response overhead exceeds its smoother throttle benefit
- Spec sheet “mode recommendations” assume one speed. Manufacturers usually tune their presets around their target marketing speed. Your actual cruise speed may be in the wrong region for their defaults
The only way to know your own crossover is to measure it. Pick your regular route. Ride it three times at each mode/FW combination you care about. Log with EUC World or WheelLog. Find your mean power at your real cruise speed. The inflection point is your own. How to find your real safe cruise speed walks through the protocol.
555 take
Field weakening is not a flaw. It’s a deliberately engineered technique that extends your speed range beyond what the battery voltage alone would allow. Every high-performance EUC uses it. Without it, a 134V wheel would top out at maybe 60 km/h (37 mph).
But it has a cost, and the cost is invisible. No beep tells you “you’re now field-weakened.” No alarm says “your torque reserve just dropped 40%.” The speed alarm fires at a fixed number - it doesn’t know whether you’re reaching that speed with full torque or on the ragged edge of the motor’s capability.
The fix is understanding, not avoidance. Know your wheel’s base speed. Know that every km/h above it costs torque reserve. Ride with margin. On low battery, that margin shrinks faster than you think - because voltage sag and field weakening compound against you.
Higher voltage buys safety. Not because the battery is bigger - because the motor can reach the same speed with less field weakening, leaving more torque for the moment you need it.
And - as the 168V telemetry above shows - the “best” mode and FW setting isn’t fixed. It depends on your actual cruise speed on your actual wheel. Measure it once. Then ride with numbers instead of guesses.