弱磁控制
每台 EUC 电机都有速度上限。不是来自固件限速或 tiltback——而是来自物理。电机产生一个与电池电压对抗的电压,到某个点电池再也推不动了。弱磁就是控制器绕过这个天花板的方法。它有效。它也以大多数骑手不理解的方式蚕食你的安全余量。
物理原理:反电动势
旋转的电机同时也是发电机。当转子旋转,永磁体扫过定子绕组,感应出一个电压——反电动势(back-EMF)。转子转得越快,反电动势越高。
问题来了:控制器只能在供电电压(来自电池)超过反电动势时向电机推入电流。低速时反电动势很小——控制器有充足的电压余量来驱动电流并产生扭矩。随着速度提升,反电动势上升。电池电压与反电动势之间的间隙缩小。间隙越小,推入电流的能力越弱,这意味着可用扭矩越少。
在某个速度——基速——反电动势等于电池电压。控制器无法再通过常规驱动方式向绕组推入电流。电机达到了它的自然速度极限。没有干预,就是这样。你在这个电压下达到了最大 RPM。
弱磁控制如何工作
控制器还有一个绝招。与其试图强行增加电压,它注入一个电流分量,部分抵消永磁体的磁场。磁场越弱,每 RPM 的反电动势越小。反电动势越小,意味着电机在撞上电压天花板之前可以转得更快。
代价:你削弱了磁场。扭矩正比于磁场强度 × 电流。磁场减弱后,同样的电流产生更少扭矩。你赢得了速度。你失去了扭矩储备。这就是弱磁的根本权衡——永远。
实际运行中控制器平滑过渡。基速以下,它运行在恒扭矩模式——满场、最大可用扭矩。基速以上,它进入弱磁模式——恒定功率、速度上升、扭矩下降。电机不会突然切换。控制器随着速度攀升逐步增加弱磁电流。
电机类型为什么重要:PMSM vs IPMSM
不是所有电机都能有效地做弱磁。
表贴式 PMSM(Surface Permanent Magnet Synchronous Motor):磁体粘在转子外侧,直接面对气隙。磁通路径固定。控制器可以尝试弱磁,但磁体会抵抗——它们的磁通难以重新导向。结果是有限的速度拓展和高电流消耗换取的微小收益。高温下有退磁风险。
内置式 PMSM(IPMSM):磁体嵌入转子内部,由钢包围。这创造了两个扭矩来源——磁体扭矩(与 PMSM 相同)和磁阻扭矩(来自转子几何)。嵌入位置让控制器能够更有效地操纵磁通路径。弱磁工作良好。速度拓展有意义。大多数现代高性能 EUC 电机使用这种架构。
对骑手的意义:IPMSM 电机做弱磁能带来可用的速度拓展,电流增加可控。表贴式 PMSM 做弱磁只带来微小收益,代价是高热量。如果你的轮子电机是为弱磁设计的(大多数 2024+ 高性能轮子都是),固件可以在限制内安全使用。
你的安全余量会怎样
这部分决定你能否留在轮子上。
在基速(无弱磁)下,电机有满扭矩可用。如果你撞到一个颠簸,控制器可以立即灌入电流进行修正。如果风推你,有余量。如果你大幅倾斜,电机响应。
在弱磁区间,每一个这样的修正都更弱。电机已经在用削弱的磁场努力维持速度。它能产生用于修正的扭矩被削减——在高弱磁水平下有时大幅削减。
这就是 overlean 最常发生的地方。你在以感觉正常的速度骑行。轮子没在报警(警报设在固定速度上,不是弱磁百分比)。但扭矩储备——电机正在输出的与它能够输出的之间的差距——随着每一个超过基速的 km/h 在缩小。
40 km/h(25 mph) 满磁场下的颠簸:电机瞬间修正,你不会察觉。同样的颠簸在 70 km/h(43 mph) 深度弱磁下:电机试图修正但没有扭矩余量。踏板下沉。如果需求超过可用,就是 overlean。
电流成本
弱磁不是免费能量。弱磁电流不直接产生有用扭矩——它被用来对抗永磁体。这意味着:
更高的总电流消耗。 电机在弱磁速度下比在相同速度下具有更高基速(来自更高电压系统)时拉取更多安培。这就是为什么 168V 轮子可以用和 134V 轮子相同的速度巡航,却用更少的弱磁和更少的热量。
更多热量。 电流通过铜产生热量(I²R 损耗)。更多电流意味着绕组、MOSFET 和线路中更多热量。持续的弱磁骑行比在基速以下相同功率骑行更快推到热极限。
电池电压降放大。 高电流消耗下,电池电压下陷更严重。电压下陷减少了控制器可用的余量。弱磁同时在对抗两件事——反电动势和电压下陷。在低电量下,这会危险地叠加。
弱磁与再生制动
一个重要但很少被讨论的效应:弱磁改变制动行为。
当你在弱磁区间刹车时,控制器反转电流方向以产生制动扭矩。但减弱的磁场意味着电机在每 RPM 产生更少反电动势。控制器需要重新强化磁场以产生有效的再生制动。这个过渡——从弱磁驱动到强化制动——发生在固件中,影响刹车手感。
一些骑手反映从高弱磁速度刹车的感觉不一样——要么比预期更强(磁场立刻恢复到满强度,突然产生更多 regen 力),要么不一致(固件处理过渡不完美)。这是固件调校问题,不是硬件限制。好的固件平滑处理它。不是所有固件都是好的。
电压:真正的速度杠杆
弱磁存在是因为电压约束。更高的电池电压抬高基速——弱磁启动的点。这就是为什么行业从 84V 走到 100V 到 126V 到 134V 到 151V 到 168V 到 176V。每一次电压跃升都用诚实的方式买到速度——余量完整。
一台 134V 轮子以 80 km/h(50 mph) 跑可能深度进入弱磁。一台 176V 轮子在同样的 80 km/h(50 mph) 可能还在基速以下,满扭矩可用。同一个骑手,同样的速度,截然不同的安全余量。这就是为什么更高的电压不只是营销——它是有物理支撑的安全。
实际含义:当你对比标称最高速度相近的轮子时,电压更高的那台在巡航速度下通常有更多扭矩储备。151V 的 Lynx 在 75 km/h(47 mph) 比 126V 的 S22 在 75 km/h(47 mph) 有更多安全余量,其他条件相同的情况下,因为 Lynx 用更少的弱磁达到这个速度。
如何知道你在弱磁中
大多数 EUC App 不显式显示”弱磁激活”。但你可以推断出来:
高速下的高 PWM。 如果 EUC World 在你的巡航速度下显示 70%+ PWM,你很可能在弱磁区间。控制器在努力工作。
扭矩感减弱。 如果你注意到在更高速度下加速感觉比同样功率需求在低速下更弱——那就是弱磁效应。电机能给的更少。
电量百分比更重要了。 在高弱磁速度下,低电量带来的电压下陷打击更重。80% 电量下感觉安全的速度在 50% 可能触发警报——因为降低的电压把你更深地推入弱磁。
关于如何绘制你自己曲线的方法,请看如何找到你真正安全的巡航速度。
固件与弱磁调校
控制器固件决定弱磁使用的激进程度。来自 EUC 社区的一些观察:
Begode 允许在 App 中调校弱磁(off-road mode vs racing mode,FW 值 0-10)。更高的值启用更多速度拓展但减少扭矩储备。off-road mode 无弱磁让你留在恒扭矩区间——最大反应、较低顶速。racing mode 配高 FW 值推高速度天花板但削薄安全网。
Inmotion 内部处理弱磁——没有用户级控制。固件根据速度、电池状态和温度管理过渡。骑手不选——固件选。
KingSong 和 LeaperKim 介于两者之间,某些模式影响弱磁启动的激进程度。
我们续航文章中的 555 建议在这里适用:0-40 km/h(0-25 mph) 城市或丘陵,off-road mode 无弱磁。0-60 km/h(0-37 mph) 需要响应制动,off-road mode 配中等弱磁。经常 60+ km/h,racing mode 配高弱磁——但要明白你在用余量换速度。
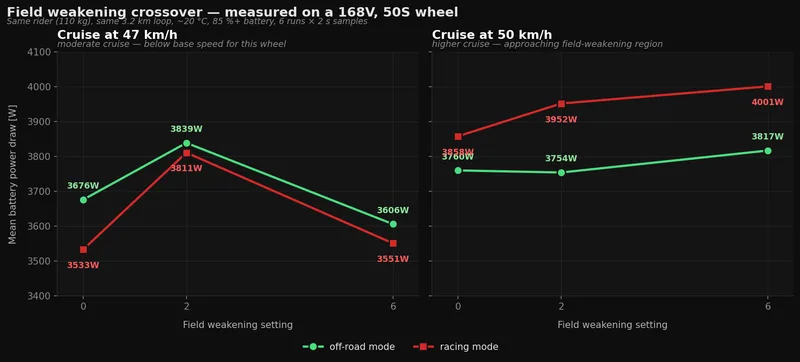
案例研究:168V 轮子上测得的 FW 交叉点
以上都是物理和固件理论。这是它在真实骑行数据中的样子——同一个 3.2 km 环线,在同一个下午跑六次,每次切换不同的 mode × FW 组合。
设置: Extreme Bull Commander GT Pro+(168 V 满电,40S × 6P 三星 50S,4400 Wh 标称 / ~4320 Wh 实际)。骑手 110 kg(243 lbs),~20°C(68°F) 环境温度,85%+ 电量,带交通停顿的城市柏油路,通过 EUC World 记录 2 秒采样。同一个骑手连续六次跑同一个环线,只改变模式(off-road vs racing) 和弱磁(FW0、FW2、FW6)。所有其他条件保持不变。
从每个日志中隔离出两个巡航窗口:45-50 km/h(28-31 mph) 的持续采样——中等巡航,远低于这台轮子的基速——以及 48-53 km/h(30-33 mph)——更高巡航,接近弱磁过渡。
数据显示什么
在 47 km/h(29 mph) ——左面板——模式效率与营销会预测的完全相反。 racing mode ——那个”激进”设置——在这个巡航速度下其实在每个 FW 设置上都比 off-road 更高效。racing FW0(3533 W) 是整个测试中最低的功率消耗。off-road FW0 同样速度多花 ~140 W。这不是免费的——racing mode 在加速尖峰时仍然产生更高的峰值电流——但在持续巡航下,更平滑的油门响应比 off-road 保守的踏板算法用更少的能量。
在 47 km/h,FW2 在两种模式下都是陷阱。 off-road FW2(3839 W) 比 off-road FW6(3606 W) 多拉 ~230 W。racing FW2(3811 W) 比 racing FW6(3551 W) 多拉 ~280 W。形状完全一样:FW2 处的局部最大值,FW0 和 FW6 处都更低。为什么?FW2 让控制器在电机实际需要之前就运行弱磁电流。在这台 168V 轮子上以 47 km/h 行驶,反电动势还没追上电池电压——没有电压天花板要对抗。FW 电流是废热。
在 50 km/h(31 mph) ——右面板——画面完全改变。 off-road mode 跨 FW 设置几乎平坦(3754-3817 W,63 W 的差距)。racing mode 随 FW 单调上升(3858 → 3952 → 4001 W,143 W 的差距)。模式对比翻转:off-road 现在在每个 FW 设置下都是更高效的选择。
这就是交叉点。在 47 km/h,基速以下,racing 赢而 FW 伤。在 50 km/h,接近基速时,off-road 赢而 racing 激进的 FW 调校变成开销。
峰值电流讲同样的故事
全部六次跑中的峰值电流消耗从 35.1 A(off-road FW6) 到 43.4 A(racing FW2) ——同一个骑手在同一条路上 23% 的差距。每次要求加速时,racing FW2 都击中最高峰值。这在 6P 三星 50S 电池包上是每颗电芯 7.2 A ——低于 25 A 每芯持续额定值的 30%,所以这台轮子上不是安全隐患。但它说明了模式和 FW 设置如何叠加:激进模式 + 低效 FW 区间 = 最高电芯压力。
这超出这台具体轮子的意义
你的数字会不同。134V 轮子有更低的基速,所以交叉点大概坐在 5-8 km/h 更低——更接近 40 km/h(25 mph)。更重的骑手把它推得更低(同样速度下更大的电流消耗更早把电机推入弱磁)。更低的电量同样。176V 轮子把交叉点推高。
能泛化的:
- 交叉点永远存在。 FW 设置有帮助的区间,也有伤害的区间。基速以下,非零 FW 是纯粹的开销。基速以上,收益取决于固件使用它的激进程度
- 模式效率取决于速度。 racing 不是普遍地”更高效”或”更低效”于 off-road。这取决于你的巡航在控制器激进响应开销超过更平滑油门收益的点之下还是之上
- 参数表上的”模式推荐”假设一个速度。 制造商通常围绕他们的目标营销速度调校他们的预设。你的实际巡航速度可能在他们默认设置的错误区间
知道你自己交叉点的唯一方法是测量它。选你的常规路线。对你关心的每个 mode/FW 组合跑三次。用 EUC World 或 WheelLog 记录。在你的真实巡航速度找到你的平均功率。拐点是你的。如何找到你真正安全的巡航速度走完了这个协议。
555 观点
弱磁不是缺陷。这是一个有意设计的技术,它将你的速度范围扩展到超出电池电压单独允许的范围。每一台高性能 EUC 都用它。没有它,134V 的轮子大概最多跑 60 km/h(37 mph)。
但它有代价,代价是看不见的。没有 beep 告诉你”你现在在弱磁中”。没有警报说”你的扭矩储备刚掉了 40%“。速度警报在一个固定数字处触发——它不知道你是用满扭矩达到那个速度,还是在电机能力的锋利边缘。
修复是理解,不是回避。了解你轮子的基速。知道每一个超过它的 km/h 都消耗扭矩储备。带着余量骑。在低电量下,那个余量缩小得比你想象的更快——因为电压下陷和弱磁一起对抗你。
更高的电压买到安全。不是因为电池更大——而是因为电机可以用更少的弱磁达到同样的速度,为你需要时留下更多扭矩。
而且——正如上面 168V 遥测显示的——“最好的”模式和 FW 设置不是固定的。这取决于你实际轮子上的实际巡航速度。测量它一次。然后用数字而不是猜测来骑。