Feldschwächung
Jeder EUC-Motor hat eine Geschwindigkeitsgrenze. Nicht durch Firmware-Limits oder Tiltback - durch Physik. Der Motor erzeugt eine Spannung, die gegen die Akkuspannung arbeitet, und an einem Punkt kann der Akku nicht mehr stärker pushen. Feldschwächung ist, wie der Controller diese Decke überlistet. Es funktioniert. Und es verkleinert deine Sicherheitsreserve auf eine Art, die die meisten Fahrer nicht verstehen.
Die Physik: Back-EMF
Ein drehender Motor ist auch ein Generator. Wenn der Rotor sich dreht, schweben die Permanentmagnete an den Statorwicklungen vorbei und induzieren eine Spannung - Back-EMF (elektromagnetische Gegenkraft). Je schneller der Rotor dreht, desto höher klettert die Back-EMF.
Hier ist das Problem: der Controller kann nur dann Strom in den Motor pushen, wenn die Versorgungsspannung (vom Akku) die Back-EMF übersteigt. Bei niedriger Drehzahl ist Back-EMF klein - der Controller hat reichlich Spannungsreserve, um Strom zu treiben und Drehmoment zu erzeugen. Wenn die Drehzahl steigt, steigt die Back-EMF. Die Lücke zwischen Akkuspannung und Back-EMF verengt sich. Weniger Lücke bedeutet weniger Fähigkeit, Strom zu pushen, was weniger verfügbares Drehmoment bedeutet.
Bei einer bestimmten Drehzahl - der Basisdrehzahl - entspricht Back-EMF der Akkuspannung. Der Controller kann keinen Strom mehr mit konventioneller Ansteuerung durch die Wicklungen pushen. Der Motor hat seine natürliche Geschwindigkeitsgrenze erreicht. Ohne Eingriff - das war’s. Du bist bei maximaler Drehzahl für diese Spannung.
Wie Feldschwächung funktioniert
Der Controller hat noch einen Trick. Statt zu versuchen, mehr Spannung zu erzwingen, injiziert er eine Stromkomponente, die das Magnetfeld der Permanentmagnete teilweise aufhebt. Weniger Magnetfeld bedeutet weniger Back-EMF pro Drehzahl. Weniger Back-EMF bedeutet, dass der Motor schneller drehen kann, bevor er auf die Spannungsdecke trifft.
Der Kompromiss: du hast das Magnetfeld reduziert. Drehmoment ist proportional zu Feldstärke × Strom. Mit geschwächtem Feld produziert derselbe Strom weniger Drehmoment. Du hast Geschwindigkeit gewonnen. Du hast Drehmomentreserve verloren. Das ist der fundamentale Kompromiss der Feldschwächung - immer.
In der Praxis wechselt der Controller fließend. Unterhalb der Basisdrehzahl läuft er im Modus konstanten Drehmoments - volles Feld, maximales Drehmoment verfügbar. Oberhalb der Basisdrehzahl geht er in den feldgeschwächten Modus - konstante Leistung, steigende Drehzahl, fallendes Drehmoment. Der Motor wechselt nicht abrupt. Der Controller erhöht den Feldschwächungsstrom graduell, während die Drehzahl steigt.
Warum der Motortyp zählt: PMSM vs IPMSM
Nicht alle Motoren können Feldschwächung effektiv umsetzen.
Surface-mount PMSM (Surface Permanent Magnet Synchronous Motor): Magnete sind an die Außenseite des Rotors geklebt, direkt am Air-Gap. Der magnetische Flusspfad ist fixiert. Der Controller kann Feldschwächung versuchen, aber die Magnete leisten Widerstand - ihr Fluss ist schwer umzuleiten. Das Ergebnis ist begrenzte Geschwindigkeitsverlängerung und hoher Stromverbrauch bei minimalem Nutzen. Risiko der Entmagnetisierung bei hohen Temperaturen.
Interior PMSM (IPMSM): Magnete sind im Rotor eingebettet, umgeben von Stahl. Das schafft zwei Drehmomentquellen - magnetisches Drehmoment (wie bei PMSM) und Reluktanzdrehmoment (aus der Geometrie des Rotors). Die eingebettete Position erlaubt dem Controller, Flusspfade effektiver zu manipulieren. Feldschwächung funktioniert gut. Geschwindigkeitsverlängerung ist sinnvoll. Die meisten modernen High-Performance-EUC-Motoren nutzen diese Architektur.
Der Unterschied zählt für Fahrer: ein IPMSM-Motor bei Feldschwächung gibt dir nutzbare Geschwindigkeitsverlängerung mit handhabbarem Stromanstieg. Ein Surface-mount PMSM bei Feldschwächung gibt marginale Gewinne bei hohen thermischen Kosten. Wenn der Motor deines Wheels für Feldschwächung ausgelegt ist (die meisten 2024+ Performance-Wheels sind es), kann die Firmware das sicher innerhalb von Grenzen nutzen.
Was mit deiner Sicherheitsreserve passiert
Das ist der Teil, der darüber entscheidet, ob du auf dem Wheel bleibst.
Bei Basisdrehzahl (keine Feldschwächung) hat der Motor volles Drehmoment verfügbar. Wenn du auf eine Bodenwelle triffst, kann der Controller sofort Strom dumpen, um zu korrigieren. Wenn Wind dich pusht, gibt es Reserve. Wenn du stark lehnst, reagiert der Motor.
Im feldgeschwächten Bereich ist jede dieser Korrekturen schwächer. Der Motor arbeitet bereits daran, Geschwindigkeit mit geschwächtem Feld zu halten. Das Drehmoment, das er für Korrekturen produzieren kann, ist reduziert - manchmal dramatisch bei hohen Feldschwächungsstufen.
Hier passieren Overleans am häufigsten. Du fährst mit einer Geschwindigkeit, die sich normal anfühlt. Das Wheel piept nicht (der Alarm ist auf eine feste Geschwindigkeit eingestellt, nicht auf einen Feldschwächungsprozentsatz). Aber die Drehmomentreserve - die Lücke zwischen dem, was der Motor liefert, und dem, was er liefern könnte - schrumpft mit jedem km/h über der Basisdrehzahl.
Eine Bodenwelle bei 40 km/h (25 mph) mit vollem Feld: der Motor korrigiert sofort, du bemerkst es nicht. Dieselbe Bodenwelle bei 70 km/h (43 mph) in tiefer Feldschwächung: der Motor versucht zu korrigieren, hat aber keine Drehmomentreserve. Die Pedale sinken. Übersteigt die Anforderung das Verfügbare, kommt der Overlean.
Die Stromkosten
Feldschwächung ist keine kostenlose Energie. Der Feldschwächungsstrom produziert nicht direkt nutzbares Drehmoment - er wird verbraucht, um gegen die Permanentmagnete zu arbeiten. Das bedeutet:
Höherer Gesamtstromverbrauch. Der Motor zieht mehr Ampere bei feldgeschwächten Geschwindigkeiten, als er bei derselben Geschwindigkeit mit einer höheren Basisdrehzahl (aus einem System mit höherer Spannung) ziehen würde. Deshalb können 168V-Wheels mit derselben Geschwindigkeit cruisen wie 134V-Wheels, mit weniger Feldschwächung und weniger Hitze.
Mehr Wärme. Strom durch Kupfer erzeugt Wärme (I²R-Verluste). Mehr Strom bedeutet mehr Wärme in den Wicklungen, MOSFETs und der Verkabelung. Anhaltende feldgeschwächte Fahrt drückt thermische Limits schneller als Fahren mit derselben Leistung unter Basisdrehzahl.
Verstärkung des Akkusags. Bei hohem Stromverbrauch sackt die Akkuspannung stärker ab. Spannungssag reduziert die verfügbare Reserve für den Controller. Die Feldschwächung kämpft gleichzeitig gegen zwei Dinge - Back-EMF und Spannungssag. Bei niedrigem Akku kumuliert sich das gefährlich.
Feldschwächung und Rekuperationsbremsen
Ein wichtiger, aber selten diskutierter Effekt: Feldschwächung verändert das Bremsverhalten.
Wenn du im feldgeschwächten Bereich bremst, kehrt der Controller den Stromfluss um, um Bremsdrehmoment zu erzeugen. Aber das geschwächte Feld bedeutet, dass der Motor weniger Back-EMF pro Drehzahl erzeugt. Der Controller muss das Feld wieder verstärken, um effektives Rekuperationsbremsen zu produzieren. Dieser Übergang - von feldgeschwächtem Motorbetrieb zu verstärktem Bremsen - passiert in der Firmware und beeinflusst, wie sich das Bremsen anfühlt.
Einige Fahrer berichten, dass Bremsen aus hohen feldgeschwächten Geschwindigkeiten sich anders anfühlt - entweder stärker als erwartet (das Feld schnappt zurück auf volle Stärke und produziert plötzlich mehr Regen-Kraft), oder inkonsistent (die Firmware managt den Übergang unvollkommen). Das ist eine Frage des Firmware-Tunings, kein Hardware-Limit. Gute Firmware handhabt das fließend. Nicht jede Firmware ist gut.
Spannung: der echte Geschwindigkeitshebel
Feldschwächung existiert wegen einer Spannungsbeschränkung. Höhere Akkuspannung hebt die Basisdrehzahl an - den Punkt, wo Feldschwächung einsetzt. Deshalb ist die Branche von 84V auf 100V auf 126V auf 134V auf 151V auf 168V auf 176V gegangen. Jeder Spannungssprung kauft Geschwindigkeit auf ehrliche Weise - mit intakter Reserve.
Ein 134V-Wheel bei 80 km/h (50 mph) kann tief in Feldschwächung sein. Ein 176V-Wheel bei denselben 80 km/h (50 mph) kann immer noch unter Basisdrehzahl sein, mit vollem Drehmoment verfügbar. Derselbe Fahrer, dieselbe Geschwindigkeit, dramatisch unterschiedliche Sicherheitsreserven. Deshalb ist höhere Spannung nicht nur Marketing - es ist physikbasierte Sicherheit.
Die praktische Implikation: wenn du Wheels mit ähnlichen Höchstgeschwindigkeiten vergleichst, hat das Wheel mit höherer Spannung generell mehr Drehmomentreserve bei Reisegeschwindigkeit. Ein 151V Lynx bei 75 km/h (47 mph) hat mehr Sicherheitsreserve als ein 126V S22 bei 75 km/h (47 mph), bei allem anderen gleich, weil der Lynx weniger Feldschwächung braucht, um diese Geschwindigkeit zu erreichen.
Wie du erkennst, dass du in Feldschwächung bist
Die meisten EUC-Apps zeigen nicht explizit “Feldschwächung aktiv” an. Aber du kannst es ableiten:
Hohes PWM bei hoher Geschwindigkeit. Wenn EUC World 70%+ PWM bei deiner Reisegeschwindigkeit zeigt, bist du wahrscheinlich im feldgeschwächten Bereich. Der Controller arbeitet hart.
Reduziertes Drehmomentgefühl. Wenn du bemerkst, dass Beschleunigung bei höheren Geschwindigkeiten schwächer wirkt als bei gleicher Leistungsanforderung bei niedrigeren Geschwindigkeiten - das ist der Feldschwächungseffekt. Der Motor hat weniger zu geben.
Akkustand zählt mehr. Bei hohen Feldschwächungsgeschwindigkeiten schlägt Spannungssag vom niedrigen Akku härter zu. Eine Geschwindigkeit, die bei 80% Akku sicher war, kann bei 50% Beeps auslösen - weil die reduzierte Spannung dich tiefer in Feldschwächung drückt.
Eine Methode, die eigene Kurve zu mappen, findest du in So findest du deine echte sichere Reisegeschwindigkeit.
Firmware und Feldschwächungs-Tuning
Die Controller-Firmware entscheidet, wie aggressiv Feldschwächung eingesetzt wird. Einige Beobachtungen aus der EUC-Community:
Begode erlaubt Feldschwächungs-Tuning in der App (off-road mode vs racing mode, FW-Werte 0-10). Höhere Werte aktivieren mehr Geschwindigkeitsverlängerung, reduzieren aber Drehmomentreserve. Off-road mode ohne Feldschwächung hält dich im konstanten Drehmomentbereich - maximale Reaktion, niedrigere Höchstgeschwindigkeit. Racing mode mit hohen FW-Werten pusht die Geschwindigkeitsdecke, dünnt aber das Sicherheitsnetz aus.
Inmotion handhabt Feldschwächung intern - keine Kontrolle für den Nutzer. Die Firmware managt den Übergang basierend auf Geschwindigkeit, Akkuzustand und Temperatur. Der Fahrer wählt nicht - die Firmware wählt.
KingSong und LeaperKim liegen irgendwo dazwischen, mit einigen Modi, die beeinflussen, wie aggressiv Feldschwächung einsetzt.
Die 555-Empfehlung aus unserem Reichweiten-Artikel gilt hier: 0-40 km/h (0-25 mph) Stadt oder Hügel, off-road mode ohne Feldschwächung. 0-60 km/h (0-37 mph) mit responsivem Bremsen, off-road mode mit moderater Feldschwächung. 60+ km/h regelmäßig, racing mode mit hoher Feldschwächung - aber verstehe, dass du Reserve gegen Geschwindigkeit tauschst.
Case Study: FW-Crossover gemessen auf einem 168V-Wheel
All das oben ist Physik- und Firmware-Theorie. Hier ist, wie es in echten Fahrdaten aussieht - sechs Durchläufe derselben 3,2 km Runde, durch jede Kombination mode × FW an einem Nachmittag.
Setup: Extreme Bull Commander GT Pro+ (168 V voll, 40S × 6P Samsung 50S, 4400 Wh angegeben / ~4320 Wh real). Fahrer 110 kg (243 lbs), ~20°C (68°F) Umgebungstemperatur, 85%+ Akku, städtischer Asphalt mit Verkehrsstopps, 2-Sekunden-Samples geloggt über EUC World. Derselbe Fahrer fuhr dieselbe Runde sechsmal hintereinander und änderte nur Mode (off-road vs racing) und Feldschwächung (FW0, FW2, FW6). Alle anderen Bedingungen wurden konstant gehalten.
Zwei Reisefenster wurden aus jedem Log isoliert: anhaltende Samples bei 45-50 km/h (28-31 mph) - moderate Reisegeschwindigkeit, weit unter der Basisdrehzahl für dieses Wheel - und 48-53 km/h (30-33 mph) - höhere Reisegeschwindigkeit, sich dem Feldschwächungsübergang nähernd.
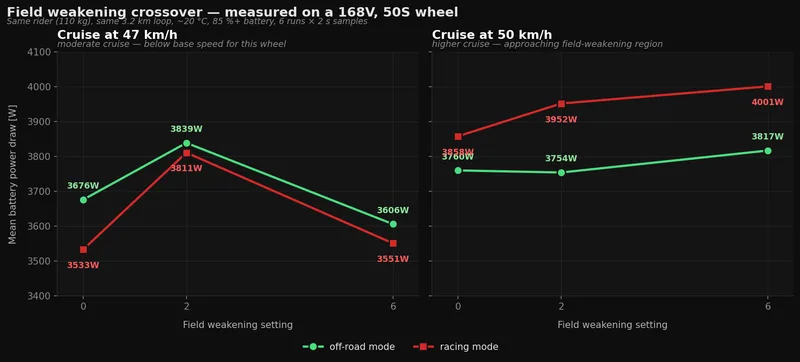
Was die Daten zeigen
Bei 47 km/h (29 mph) - linkes Panel - ist die Modus-Effizienz umgekehrt zu dem, was Marketing vorhersagen würde. Racing mode - die “aggressive” Einstellung - ist bei dieser Reisegeschwindigkeit tatsächlich effizienter als off-road bei jeder FW-Einstellung. Racing FW0 (3533 W) ist die niedrigste Leistungsaufnahme im ganzen Test. Off-road FW0 kostet ~140 W mehr für dieselbe Geschwindigkeit. Das ist nicht umsonst - racing mode erzeugte immer noch höhere Peak-Ströme während Beschleunigungsspikes - aber bei anhaltender Reisegeschwindigkeit nutzt die sanftere Gasreaktion weniger Energie als der konservative Pedal-Algorithmus von off-road.
Bei 47 km/h ist FW2 eine Falle in beiden Modi. Off-road FW2 (3839 W) zieht ~230 W mehr als off-road FW6 (3606 W). Racing FW2 (3811 W) zieht ~280 W mehr als racing FW6 (3551 W). Die Form ist identisch: lokales Maximum bei FW2, niedriger bei beiden FW0 und FW6. Warum? FW2 verpflichtet den Controller, Feldschwächungsstrom zu fahren, bevor der Motor ihn tatsächlich braucht. Bei 47 km/h auf diesem 168V-Wheel hat Back-EMF noch nicht zur Akkuspannung aufgeschlossen - es gibt keine Spannungsdecke zu bekämpfen. Der FW-Strom ist Abwärme.
Bei 50 km/h (31 mph) - rechtes Panel - ändert sich das Bild komplett. Off-road mode ist über FW-Einstellungen nahezu flach (3754-3817 W, ein 63 W Spread). Racing mode steigt monoton mit FW (3858 → 3952 → 4001 W, ein 143 W Spread). Und der Modus-Vergleich kehrt sich um: off-road ist jetzt die effizientere Wahl bei jeder FW-Einstellung.
Das ist der Crossover. Bei 47 km/h, unter der Basisdrehzahl, gewinnt racing und FW schadet. Bei 50 km/h, sich der Basisdrehzahl nähernd, gewinnt off-road und das aggressive FW-Tuning von racing wird zum Overhead.
Peak-Strom erzählt dieselbe Geschichte
Die Peak-Stromaufnahme über die sechs Durchläufe lag zwischen 35,1 A (off-road FW6) und 43,4 A (racing FW2) - ein 23% Spread vom selben Fahrer auf derselben Straße. Racing FW2 traf jedes Mal den höchsten Peak, wenn Beschleunigung gefordert wurde. Das sind 7,2 A pro Zelle in diesem 6P Samsung 50S Pack - unter 30% der 25 A Dauerbelastung pro Zelle, also kein Sicherheitsproblem auf diesem Wheel. Aber es illustriert, wie sich Modus- und FW-Einstellungen kumulieren: aggressiver Modus + ineffizienter FW-Bereich = höchster Zellstress.
Was das über dieses spezifische Wheel hinaus bedeutet
Deine Zahlen werden anders sein. Ein 134V-Wheel hat eine niedrigere Basisdrehzahl, also sitzt der Crossover wahrscheinlich 5-8 km/h tiefer - näher an 40 km/h (25 mph). Ein schwererer Fahrer verschiebt ihn weiter nach unten (höhere Stromaufnahme bei derselben Geschwindigkeit drückt den Motor früher in Feldschwächung). Ein niedrigerer Ladezustand tut dasselbe. Ein 176V-Wheel pusht den Crossover nach oben.
Was sich verallgemeinert:
- Es gibt immer einen Crossover. FW-Einstellungen haben einen Bereich, wo sie helfen, und einen Bereich, wo sie schaden. Unter der Basisdrehzahl ist ein FW-Wert ungleich null reiner Overhead. Über der Basisdrehzahl hängt der Nutzen davon ab, wie aggressiv die Firmware ihn nutzt
- Modus-Effizienz ist geschwindigkeitsabhängig. Racing ist nicht universell “effizienter” oder “weniger effizient” als off-road. Es hängt davon ab, ob du unter oder über dem Punkt cruist, wo der Overhead der aggressiven Reaktion des Controllers den Nutzen der sanfteren Gasreaktion übersteigt
- Die “Modus-Empfehlungen” des Datenblatts nehmen eine Geschwindigkeit an. Hersteller tunen ihre Presets meist um ihre Ziel-Marketing-Geschwindigkeit. Deine tatsächliche Reisegeschwindigkeit kann im falschen Bereich für ihre Defaults liegen
Der einzige Weg, deinen eigenen Crossover zu kennen, ist ihn zu messen. Wähle deine reguläre Strecke. Fahr sie dreimal bei jeder Mode/FW-Kombination, die dich interessiert. Logge mit EUC World oder WheelLog. Finde deine Durchschnittsleistung bei deiner echten Reisegeschwindigkeit. Der Wendepunkt ist deiner. So findest du deine echte sichere Reisegeschwindigkeit führt durch das Protokoll.
555 take
Feldschwächung ist kein Fehler. Es ist eine bewusst konstruierte Technik, die deinen Geschwindigkeitsbereich über das hinaus erweitert, was die Akkuspannung allein erlauben würde. Jedes High-Performance-EUC nutzt es. Ohne es würde ein 134V-Wheel bei vielleicht 60 km/h (37 mph) enden.
Aber es hat Kosten, und die Kosten sind unsichtbar. Kein Beep sagt dir “du bist jetzt feldgeschwächt”. Kein Alarm sagt “deine Drehmomentreserve ist gerade um 40% gesunken”. Der Geschwindigkeitsalarm feuert bei einer festen Zahl - er weiß nicht, ob du diese Geschwindigkeit mit vollem Drehmoment erreichst oder am äußersten Rand der Motorfähigkeit.
Die Lösung ist Verstehen, nicht Vermeiden. Kenne die Basisdrehzahl deines Wheels. Wisse, dass jeder km/h darüber Drehmomentreserve kostet. Fahre mit Reserve. Bei niedrigem Akku schrumpft diese Reserve schneller als du denkst - weil Spannungssag und Feldschwächung sich gegen dich kumulieren.
Höhere Spannung kauft Sicherheit. Nicht weil der Akku größer ist - sondern weil der Motor dieselbe Geschwindigkeit mit weniger Feldschwächung erreichen kann und mehr Drehmoment für den Moment übriglässt, in dem du es brauchst.
Und - wie die 168V-Telemetrie oben zeigt - der “beste” Modus und die beste FW-Einstellung sind nicht fest. Es hängt von deiner tatsächlichen Reisegeschwindigkeit auf deinem tatsächlichen Wheel ab. Miss es einmal. Dann fahre mit Zahlen statt mit Raten.