Osłabianie pola
Każdy silnik EUC ma sufit prędkości. Nie z limitów firmware albo tiltbacka - z fizyki. Silnik generuje napięcie które walczy z napięciem baterii i w pewnym momencie bateria nie może pchać mocniej. Field weakening to sposób w jaki kontroler oszukuje ten sufit. Działa. I zjada twój margines bezpieczeństwa w sposób którego większość riderów nie rozumie.
Fizyka: back-EMF
Wirujący silnik to też generator. Gdy rotor się kręci, magnesy stałe przemykają nad uzwojeniami stojana indukując napięcie - back-EMF (elektromotoryczną siłę wsteczną). Im szybciej kręci się rotor, tym wyżej wspina się back-EMF.
Problem: kontroler może wpychać prąd w silnik tylko wtedy gdy napięcie zasilania (z baterii) przekracza back-EMF. Przy niskiej prędkości back-EMF jest małe - kontroler ma mnóstwo zapasu napięcia żeby dawać prąd i produkować moment obrotowy. Gdy prędkość rośnie, back-EMF rośnie. Szczelina między napięciem baterii a back-EMF się zawęża. Mniejsza szczelina to mniejsza zdolność do pchania prądu, co znaczy mniej dostępnego momentu.
Przy pewnej prędkości - prędkości bazowej - back-EMF równa się napięciu baterii. Kontroler nie może już wpychać prądu w uzwojenia w standardowy sposób. Silnik trafił w swój naturalny limit prędkości. Bez interwencji - tyle. Jesteś na maksymalnych obrotach przy tym napięciu.
Jak działa osłabianie pola
Kontroler ma jeszcze jeden trik. Zamiast próbować wymusić większe napięcie, wtłacza komponent prądu który częściowo znosi pole magnetyczne stałych magnesów. Mniejsze pole magnetyczne to mniejsze back-EMF na RPM. Mniejsze back-EMF oznacza że silnik może się kręcić szybciej zanim uderzy w sufit napięcia.
Kompromis: zredukowałeś pole magnetyczne. Moment obrotowy jest proporcjonalny do siły pola × prąd. Z osłabionym polem ten sam prąd produkuje mniejszy moment. Zyskałeś prędkość. Straciłeś rezerwę momentu. To jest fundamentalny kompromis field weakeningu - zawsze.
W praktyce kontroler przechodzi płynnie. Poniżej prędkości bazowej działa w trybie stałego momentu - pełne pole, maksymalny moment dostępny. Powyżej prędkości bazowej wchodzi w tryb osłabionego pola - stała moc, rosnąca prędkość, malejący moment. Silnik nie przełącza się nagle. Kontroler stopniowo zwiększa prąd osłabiający pole gdy prędkość rośnie.
Dlaczego typ silnika ma znaczenie: PMSM vs IPMSM
Nie wszystkie silniki mogą efektywnie robić field weakening.
Surface-mount PMSM (Surface Permanent Magnet Synchronous Motor): magnesy są przyklejone do zewnętrznej strony rotora, bezpośrednio przy air gap. Ścieżka strumienia magnetycznego jest stała. Kontroler może próbować field weakeningu, ale magnesy stawiają opór - ich strumień trudno przekierować. Rezultat to ograniczone wydłużenie prędkości i wysoki pobór prądu przy minimalnym zysku. Ryzyko demagnetyzacji przy wysokich temperaturach.
Interior PMSM (IPMSM): magnesy są osadzone wewnątrz rotora, otoczone stalą. To tworzy dwa źródła momentu obrotowego - moment magnetyczny (jak w PMSM) i moment reluktancyjny (z geometrii rotora). Osadzona pozycja pozwala kontrolerowi skuteczniej manipulować ścieżkami strumienia. Field weakening działa dobrze. Wydłużenie prędkości jest znaczące. Większość nowoczesnych high-performance silników EUC używa tej architektury.
Różnica ma znaczenie dla riderów: silnik IPMSM na field weakeningu daje ci użyteczne wydłużenie prędkości z manageable wzrostem prądu. Silnik surface-mount PMSM na field weakeningu daje marginalne zyski przy wysokim koszcie termicznym. Jeśli silnik twojego koła jest zaprojektowany pod field weakening (większość kół od 2024 tak ma), firmware może tego używać bezpiecznie w granicach.
Co dzieje się z twoim marginesem bezpieczeństwa
To jest część która decyduje o tym czy zostajesz na kole.
Przy prędkości bazowej (bez field weakeningu) silnik ma pełny moment dostępny. Jeśli wjedziesz w wybój, kontroler może natychmiast wylać prąd żeby skorygować. Jeśli wiatr cię pchnie, jest zapas. Jeśli mocno się przechylisz, silnik odpowiada.
W zakresie osłabionego pola każda z tych korekt jest słabsza. Silnik już pracuje żeby utrzymać prędkość z osłabionym polem. Moment który może wyprodukować na korekty jest zredukowany - czasami dramatycznie przy wysokich poziomach field weakeningu.
Właśnie tu najczęściej dochodzi do overleanów. Jedziesz z prędkością która czuje się normalnie. Koło nie pika (alarm jest ustawiony na stałą prędkość, nie na procent field weakeningu). Ale rezerwa momentu - różnica między tym co silnik dostarcza a tym co mógłby dostarczyć - kurczy się z każdym km/h powyżej prędkości bazowej.
Wybój przy 40 km/h (25 mph) z pełnym polem: silnik koryguje natychmiast, nie zauważasz. Ten sam wybój przy 70 km/h (43 mph) w głębokim field weakeningu: silnik próbuje skorygować, ale nie ma zapasu momentu. Pedały lecą w dół. Jeśli zapotrzebowanie przekracza to co dostępne - overlean.
Koszt prądu
Field weakening nie jest darmową energią. Prąd osłabiający pole nie produkuje bezpośrednio użytecznego momentu - jest wydawany na walkę ze stałymi magnesami. To oznacza:
Wyższy całkowity pobór prądu. Silnik ciągnie więcej amperów przy prędkościach osłabionego pola niż ciągnąłby przy tej samej prędkości mając wyższą prędkość bazową (z systemu o wyższym napięciu). Dlatego koła 168V mogą cruise’ować z tą samą prędkością co koła 134V z mniejszym field weakeningiem i mniejszą ilością ciepła.
Więcej ciepła. Prąd przez miedź produkuje ciepło (straty I²R). Więcej prądu to więcej ciepła w uzwojeniach, MOSFET-ach i okablowaniu. Długotrwała jazda w osłabionym polu pcha limity termiczne szybciej niż jazda z tą samą mocą poniżej prędkości bazowej.
Wzmocnienie sagu baterii. Przy wysokim poborze prądu napięcie baterii saguje mocniej. Sag napięcia redukuje dostępny zapas dla kontrolera. Field weakening walczy jednocześnie z dwiema rzeczami - back-EMF i sagiem napięcia. Przy niskiej baterii to kumuluje się niebezpiecznie.
Field weakening a hamowanie regeneracyjne
Ważny ale rzadko omawiany efekt: field weakening zmienia zachowanie przy hamowaniu.
Gdy hamujesz w zakresie osłabionego pola, kontroler odwraca kierunek prądu żeby wygenerować moment hamowania. Ale osłabione pole oznacza że silnik generuje mniej back-EMF na RPM. Kontroler musi ponownie wzmocnić pole żeby wyprodukować efektywne hamowanie regeneracyjne. To przejście - od napędzania w osłabionym polu do wzmocnionego hamowania - dzieje się w firmware i wpływa na to jak hamowanie się czuje.
Niektórzy riderzy raportują że hamowanie z wysokich prędkości osłabionego pola czuje się inaczej - albo mocniej niż oczekiwane (pole wraca do pełnej siły, nagle produkując więcej siły regen), albo niespójnie (firmware zarządza przejściem niedoskonale). To jest kwestia firmware tuningu, nie limit hardware. Dobry firmware obsługuje to płynnie. Nie każdy firmware jest dobry.
Napięcie: prawdziwa dźwignia prędkości
Field weakening istnieje przez ograniczenie napięcia. Wyższe napięcie baterii podnosi prędkość bazową - punkt w którym field weakening się załącza. Dlatego branża szła z 84V do 100V do 126V do 134V do 151V do 168V do 176V. Każdy skok napięcia kupuje prędkość uczciwym sposobem - z nietkniętym zapasem.
Koło 134V przy 80 km/h (50 mph) może być głęboko w field weakeningu. Koło 176V przy tych samych 80 km/h (50 mph) może być nadal poniżej prędkości bazowej, z pełnym momentem dostępnym. Ten sam rider, ta sama prędkość, drastycznie różne marginesy bezpieczeństwa. Dlatego wyższe napięcie to nie jest tylko marketing - to bezpieczeństwo poparte fizyką.
Praktyczna implikacja: gdy porównujesz koła o podobnych prędkościach maksymalnych, koło o wyższym napięciu będzie generalnie miało więcej zapasu momentu przy prędkości cruise. Lynx 151V przy 75 km/h (47 mph) ma więcej marginesu bezpieczeństwa niż S22 126V przy 75 km/h (47 mph), przy wszystkim innym równym, bo Lynx używa mniej field weakeningu żeby osiągnąć tę prędkość.
Jak poznać że jesteś w field weakeningu
Większość aplikacji EUC nie pokazuje explicite “field weakening aktywny”. Ale możesz to wydedukować:
Wysokie PWM przy wysokiej prędkości. Jeśli EUC World pokazuje 70%+ PWM przy twojej prędkości cruise, prawdopodobnie jesteś w zakresie osłabionego pola. Kontroler ciężko pracuje.
Zredukowane odczucie momentu. Jeśli zauważysz że akceleracja czuje się słabiej przy wyższych prędkościach w porównaniu z tym samym zapotrzebowaniem na moc przy niższych prędkościach - to efekt field weakeningu. Silnik ma mniej do dania.
Procent baterii ma większe znaczenie. Przy wysokich prędkościach field weakeningu sag napięcia z niskiej baterii uderza mocniej. Prędkość która czuła się bezpiecznie przy 80% baterii może wywołać beepy przy 50% - bo zredukowane napięcie pcha cię głębiej w field weakening.
Po metodę zmapowania własnej krzywej zajrzyj do jak znaleźć swoją realną bezpieczną prędkość przelotową.
Firmware i tuning field weakeningu
Firmware kontrolera decyduje jak agresywnie używać field weakeningu. Kilka obserwacji ze społeczności EUC:
Begode pozwala tuningować field weakening w aplikacji (off-road mode vs racing mode, wartości FW 0-10). Wyższe wartości włączają większe wydłużenie prędkości ale redukują rezerwę momentu. Off-road mode bez field weakeningu trzyma cię w zakresie stałego momentu - maksymalna reakcja, niższa prędkość maksymalna. Racing mode z wysokimi FW pcha sufit prędkości ale ścienia siatkę bezpieczeństwa.
Inmotion obsługuje field weakening wewnętrznie - bez kontroli dla użytkownika. Firmware zarządza przejściem na podstawie prędkości, stanu baterii i temperatury. Rider nie wybiera - firmware wybiera.
KingSong i LeaperKim są gdzieś pośrodku, z niektórymi trybami wpływającymi na to jak agresywnie field weakening się załącza.
Rekomendacja 555 z naszego artykułu o zasięgu stosuje się tutaj: 0-40 km/h (0-25 mph) miasto albo pagórki, off-road mode bez field weakeningu. 0-60 km/h (0-37 mph) z responsywnym hamowaniem, off-road mode z umiarkowanym field weakeningiem. 60+ km/h regularnie, racing mode z wysokim field weakeningiem - ale rozumiej że wymieniasz margines na prędkość.
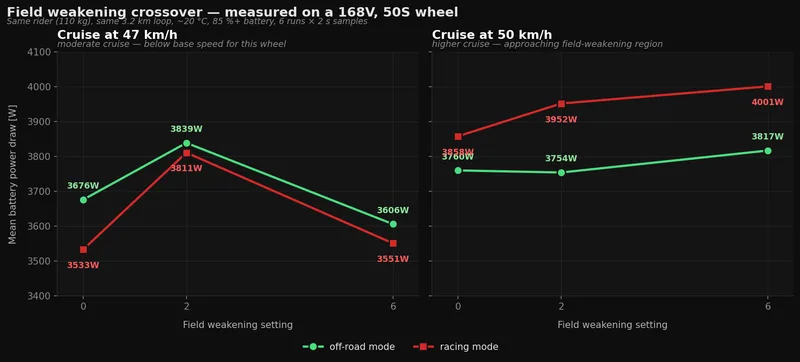
Case study: crossover FW zmierzony na kole 168V
Wszystko powyżej to fizyka i teoria firmware. Oto jak to wygląda w realnych danych z jazdy - sześć przebiegów tej samej pętli 3.2 km, przełączając przez każdą kombinację mode × FW tego samego popołudnia.
Setup: Extreme Bull Commander GT Pro+ (168 V pełne, 40S × 6P Samsung 50S, 4400 Wh deklarowane / ~4320 Wh realne). Rider 110 kg (243 lbs), ~20°C (68°F) ambient, 85%+ baterii, miejski asfalt z postojami w ruchu, 2-sekundowe sample logowane przez EUC World. Ten sam rider przejechał tę samą pętlę sześć razy pod rząd, zmieniając tylko tryb (off-road vs racing) i field weakening (FW0, FW2, FW6). Wszystkie inne warunki utrzymane stałe.
Dwa okna cruise zostały wyizolowane z każdego logu: stabilne sample przy 45-50 km/h (28-31 mph) - umiarkowany cruise, dobrze poniżej prędkości bazowej dla tego koła - i 48-53 km/h (30-33 mph) - wyższy cruise, zbliżający się do przejścia field weakeningu.
Co pokazują dane
Przy 47 km/h (29 mph) - lewy panel - efektywność trybów jest odwrócona względem tego co przewidziałby marketing. Racing mode - to “agresywne” ustawienie - jest faktycznie efektywniejszy przy tej prędkości cruise niż off-road przy każdym ustawieniu FW. Racing FW0 (3533 W) to najniższy pobór mocy w całym teście. Off-road FW0 kosztuje ~140 W więcej dla tej samej prędkości. To nie za darmo - racing mode nadal generował wyższe peaki prądu podczas spike’ów akceleracji - ale przy stabilnym cruise gładsza reakcja gazu zużywa mniej energii niż konserwatywny algorytm pedału off-road.
Przy 47 km/h FW2 to pułapka w obu trybach. Off-road FW2 (3839 W) ciągnie ~230 W więcej niż off-road FW6 (3606 W). Racing FW2 (3811 W) ciągnie ~280 W więcej niż racing FW6 (3551 W). Kształt jest identyczny: lokalne maksimum przy FW2, niższe przy FW0 i FW6. Dlaczego? FW2 zobowiązuje kontroler do prowadzenia prądu field weakeningu zanim silnik faktycznie tego potrzebuje. Przy 47 km/h na tym kole 168V back-EMF jeszcze nie dogoniło napięcia baterii - nie ma sufitu napięcia do zwalczania. Prąd FW to ciepło odpadowe.
Przy 50 km/h (31 mph) - prawy panel - obraz zmienia się kompletnie. Off-road mode jest prawie płaski w ustawieniach FW (3754-3817 W, spread 63 W). Racing mode rośnie monotonicznie z FW (3858 → 3952 → 4001 W, spread 143 W). I porównanie trybów się odwraca: off-road jest teraz bardziej efektywnym wyborem przy każdym ustawieniu FW.
To jest crossover. Przy 47 km/h, poniżej prędkości bazowej, racing wygrywa a FW szkodzi. Przy 50 km/h, zbliżając się do prędkości bazowej, off-road wygrywa a agresywny tuning FW w racing zamienia się w overhead.
Peak current opowiada tę samą historię
Peak pobór prądu w całych sześciu przebiegach wahał się od 35.1 A (off-road FW6) do 43.4 A (racing FW2) - 23% spread tego samego ridera na tej samej drodze. Racing FW2 uderzał w najwyższy peak za każdym razem gdy wymagana była akceleracja. To 7.2 A na celę w tym pakiecie 6P Samsung 50S - poniżej 30% ciągłego ratingu 25 A na celę, więc nie zagrożenie bezpieczeństwa na tym kole. Ale ilustruje jak tryb i ustawienia FW się kumulują: agresywny tryb + nieefektywny region FW = największy stres komórek.
Co to znaczy poza tym konkretnym kołem
Twoje liczby będą inne. Koło 134V ma niższą prędkość bazową, więc crossover prawdopodobnie siedzi 5-8 km/h niżej - bliżej 40 km/h (25 mph). Cięższy rider przesuwa go dalej w dół (większy pobór prądu przy tej samej prędkości pcha silnik w field weakening wcześniej). Niższy stan naładowania robi to samo. Koło 176V pcha crossover wyżej.
Co się generalizuje:
- Crossover zawsze istnieje. Ustawienia FW mają region gdzie pomagają i region gdzie szkodzą. Poniżej prędkości bazowej niezerowe FW to czysty overhead. Powyżej prędkości bazowej korzyść zależy od tego jak agresywnie firmware tego używa
- Efektywność trybu zależy od prędkości. Racing nie jest uniwersalnie “bardziej efektywny” ani “mniej efektywny” od off-road. Zależy czy cruise’ujesz poniżej czy powyżej punktu gdzie overhead agresywnej reakcji kontrolera przekracza korzyść gładszego gazu
- “Rekomendacje trybu” ze spec sheet zakładają jedną prędkość. Producenci zwykle stroją swoje presety wokół swojej docelowej prędkości marketingowej. Twoja realna prędkość cruise może być w złym regionie dla ich domyślnych ustawień
Jedyny sposób żeby poznać swój własny crossover to go zmierzyć. Wybierz swoją regularną trasę. Przejedź ją trzy razy przy każdej kombinacji mode/FW która cię interesuje. Zaloguj przez EUC World albo WheelLog. Znajdź swoją średnią moc przy swojej realnej prędkości cruise. Punkt przegięcia jest twój. Jak znaleźć swoją realną bezpieczną prędkość przelotową prowadzi przez protokół.
555 take
Field weakening to nie wada. To celowo zaprojektowana technika która rozszerza twój zakres prędkości poza to co samo napięcie baterii by pozwoliło. Każdy high-performance EUC tego używa. Bez tego koło 134V kończyłoby się maksymalnie przy 60 km/h (37 mph).
Ale ma koszt i ten koszt jest niewidoczny. Żaden beep nie mówi ci “jesteś teraz w field weakeningu”. Żaden alarm nie mówi “twoja rezerwa momentu właśnie spadła o 40%”. Alarm prędkości strzela przy stałej liczbie - nie wie czy osiągasz tę prędkość z pełnym momentem czy na samej krawędzi możliwości silnika.
Naprawa to zrozumienie, nie unikanie. Poznaj prędkość bazową swojego koła. Wiedz że każdy km/h powyżej niej kosztuje rezerwę momentu. Jedź z marginesem. Przy niskiej baterii ten margines kurczy się szybciej niż myślisz - bo sag napięcia i field weakening kumulują się przeciwko tobie.
Wyższe napięcie kupuje bezpieczeństwo. Nie dlatego że bateria jest większa - bo silnik może osiągnąć tę samą prędkość z mniejszym field weakeningiem, zostawiając więcej momentu na moment w którym tego potrzebujesz.
I - jak pokazuje telemetria 168V powyżej - “najlepszy” tryb i ustawienie FW nie jest stałe. Zależy od twojej realnej prędkości cruise na twoim realnym kole. Zmierz to raz. Potem jedź z liczbami zamiast ze zgadywaniem.