如何找到你真正安全的巡航速度
你参数表上的最高速度不是你的。那是实验室数据——轻骑手、满电、温和天气、平地、新电芯、轮子设在 racing 模式,一切都为了得到最高的数字。你真正安全的巡航速度更低。通常是标称值的 70-85%,往往更低。这份指南告诉你怎么找到自己的。
你需要什么
- 你的轮子
- 装了 EUC World、WheelLog 或 DarknessBot 的手机;前提是你的轮子和 App 能显示 PWM 或功率(用于方法 2 和 3)
- 一段空旷、笔直、平坦、视野良好的道路(用于方法 3)
- 关于你的体重、充电习惯和路线的诚实答案
为什么盒子上的数字不是你的
物理原理在弱磁控制文章里讲过。实际结论:在标称最高速度下,控制器在理想条件下以 85-95% PWM 运行。PWM 是控制器保持你平衡的余量——90% 时还剩 10% 应对颠簸或阵风。100% 时,已经没有余量继续稳定倒立摆了。这不是设计好的 cutoff;实际结果通常是 overpower、overlean 或 faceplant。
五个变量在你离开实验室的那一刻就开始吃掉这个余量:
- 骑手体重。 骑手越重,电流越大,电压跌落越多,同样速度下 PWM 越高
- 电池电量状态。 SoC 越低,静息电压越低,负载下跌落越严重。需要更高 PWM 才能保持同样速度
- 温度。 冷电芯内阻更高。跌落更多。PWM 更高
- 电芯老化。 跑了 15,000 km(9,320 mi) 的电池包比新的跌落更严重。同样速度,消耗更多余量
- 坡度和风。 上坡或逆风都会在同样速度下增加电机负载。同样的 PWM 数学
这些因素会叠加。同样的速度,在六月、暖电池、新电池包时可能没问题;到了冬天、低 SoC、老电池包再加逆风,就可能变得危险。速度表上仍然是你平常的巡航速度,但控制器可能比你的基准高出 20+ 个百分点 PWM。你骑得比你以为的更接近边缘。
方法 1:80% 规则
零工具。适用于任何人的任何轮子。
取制造商标称的最高速度。乘以 0.8。在那个速度或以下巡航。
- 轮子标称 85 km/h(53 mph) → 巡航不超过 68 km/h(42 mph)
- 轮子标称 70 km/h(43 mph) → 巡航不超过 56 km/h(35 mph)
- 轮子标称 95 km/h(59 mph) → 巡航不超过 76 km/h(47 mph)
近似值,但比直接相信参数表好得多。如果你不用 App 骑行,或者只想要一个心理上限,用这个。对于更重的骑手(100+ kg / 220+ lbs)、山地地形或寒冷冬天,降到 70% 而不是 80%。
方法 2:在 App 里监控 PWM
真正的方法。给你一个与你实际骑行挂钩的数字,不是实验室的。
设置:
- 安装 EUC World、WheelLog 或 DarknessBot
- 通过蓝牙连接你的轮子
- 打开带 PWM 显示的实时仪表盘
- 设置 safety margin 警报。保守目标:持续 80% PWM 时触发警报
如何使用:
按你平常的路线、平常的速度骑行。观察持续 PWM ——保持一个速度 5+ 秒之后的稳态读数,不是加速时的峰值。
- 持续 PWM 低于 70% —— 余量充足。安全的巡航区域
- 持续 PWM 70-80% —— 软上限。短时间可以,不适合巡航
- 持续 PWM 高于 80% —— 收益递减区。每多一个 km/h 都要付出真实的余量
- 警报响起 —— 减速。别跟它争
你的巡航速度是你在最坏预期条件下(冷、低电、老电池)仍然保持 PWM 低于 70% 的最快速度。不是你最好的条件。
方法 3:个人 PWM 曲线
给想要真实数据的骑手。一次专注的测试,你就知道自己的数字。
条件:
- 电量 60-80%(中段,不要刚充满)
- 空旷、笔直、平坦、无风的道路
- 全套护具——这是高速测试
- 在 EUC World、WheelLog 或 DarknessBot 里开启日志记录(CSV 导出)
流程:
在每个目标速度下以恒定速度稳定巡航 10+ 秒。在稳定部分记录 PWM,不要在加速时记录。每个速度重复 3 次,取平均。
目标速度:30、40、50、60、70 km/h(19, 25, 31, 37, 43 mph)——如果你的轮子标称更高并且你有这个技术,可以继续往上。
你会得到什么:
在任何电子表格里把速度对平均 PWM 画出来。你会看到一条曲线,低速时相对平坦,然后在某一点急剧上升。那个拐点就是你的基速——你这个骑手加这个轮子的组合下弱磁开始的地方。
你的巡航上限:曲线穿过 70% PWM 的那个速度。这就是你在当前条件下的真实巡航数字。
在 30% 电量下、或寒冷的早上、或背着 10 kg(22 lbs) 的背包再跑一次同样的流程,曲线会向左移。这个移动就是参数表和现实之间的差距,被可视化了。
你的 App 没有 PWM?
有些轮子不通过蓝牙报告 PWM,有些 App 不暴露它。如果你的轮子或 App 是这种情况,用功率消耗代替。功率在和 PWM 相同的拐点上升——这是同一个物理用不同窗口看。画速度在 X 轴、平均功率(W) 在 Y 轴。找曲线开始明显更快上升的位置。把你的上限设在它下方 5-10 km/h。方法相同。数据只是不那么直接。
案例示范——曲线实际上长什么样
这是方法 3 的一次测试产出的结果。同一条 3.2 km 城市环线跑六次,骑手 110 kg,Extreme Bull GT PRO+(168V、三星 50S),来自 EUC World 的 2 秒采样。X 轴是速度,Y 轴是每 2 km/h 区间的平均功率,阴影表示第 25 到第 75 百分位范围,让你看到噪声。
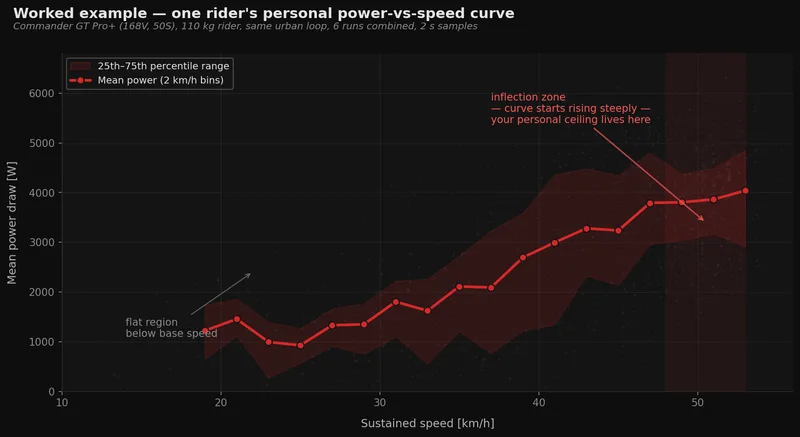
从图上读什么。 从 20 到 45 km/h,平均功率缓慢攀升——每多一个 km/h 大约 90 W。这是平坦区间。你远低于基速;电机有充足的电压余量,弱磁电流很少,每多一个 km/h 的成本大约就是阻力物理学预测的数值。从 47 km/h 往上,斜率开始变化。IQR 带变宽。单个采样分散更多。这是控制器开始更努力地工作——弱磁开始启动,电压下陷在加速尖峰上被放大,反电动势逐渐接近电池电压。
对这个骑手、这台轮子来说,安全巡航上限大约是 52 km/h ——在拐点区之下,有余量。制造商标称的最高速度是 200 km/h(off-road free spin) 或 257 km/h(racing free spin)。把 80% 规则应用在标称最大速度上会得到 160 km/h。在实际轮子上测得的真实数字,不到它的三分之一。
一个诚实的说明。 在这台轮子上,骑手达到的速度(最大 ~55 km/h),拐点并不剧烈。它不是图表上的突然悬崖,而是功率开始比之前更快上升的位置。骑手没有推得足够深入弱磁来产生一个锐利的拐点——在这台 168V 轮子上需要以 65-75 km/h 巡航才会出现。没关系。方法仍然有效:找到你的曲线开始偏离早期缓和斜率的速度,坐在它下方 5-10 km/h。在电压更低的轮子上(134V、126V),或更重的骑手,或更低的 SoC,拐点更锐利,出现得更早。骑 134V 轮子跑同样协议的骑手,很可能会在 40-45 km/h 区间看到清晰的拐点区域,而不是超过 50 km/h 的缓和弯曲。
为什么大多数评测者不发布这个
在陌生轮子上做高速日志记录很危险。每个速度做三次干净测试、得到可靠的曲线,是一整天的工作。赞助商不想在视频里看到”我这台在标称最高速度时跑到 89% PWM,别在那里巡航”。观众留存偏爱”冲就完了”,而不是散点图。结果:你看到评测者说”75 km/h(47 mph) 动力充足,感觉超丝滑”,而他是以 70 kg(154 lbs) 满电在封闭场地测试的,然后你把这个推断到你 95 kg(209 lbs) 在 40% 电量寒冷中的通勤。评测者没有撒谎。推断才是问题。
555 观点
你参数表上的最高速度是一个工程数据点,不是骑行建议。它是轮子曾经达到过的上限,不是你个人的上限。
从 80% 规则开始。如果你认真骑行,升级到 PWM 监控。如果你想真正知道自己的边缘在哪里,跑一次曲线。十分钟的测量胜过一年的猜测。
你真正的巡航速度比盒子承诺的要低,而且会变化。在六月 80% 电量时 70 km/h(43 mph) 安全的轮子,在一月 40% 电量时可能在 65 km/h(40 mph) 就已经到边缘了。去检查。不要假设。