So findest du deine echte sichere Reisegeschwindigkeit
Die Höchstgeschwindigkeit auf deinem Datenblatt ist nicht deine. Das ist ein Laborwert - leichter Fahrer, voller Akku, mildes Wetter, ebener Untergrund, frische Zellen, Wheel im Racing-Modus, alles optimiert für die höchstmögliche Zahl. Deine echte sichere Reisegeschwindigkeit ist niedriger. Normalerweise 70-85% des angegebenen Werts, oft weniger. Diese Anleitung zeigt dir, wie du deine findest.
Was du brauchst
- Dein Wheel
- Ein Handy mit EUC World, WheelLog oder DarknessBot, wenn dein Wheel und die App PWM oder Leistung anzeigen (für Methoden 2 und 3)
- Eine leere, gerade, ebene Straße mit guter Sicht (für Methode 3)
- Ehrliche Antworten über dein Gewicht, deine Ladegewohnheiten und deine Strecken
Warum die Zahl auf der Box nicht deine ist
Die Physik steht im Feldschwächungs-Artikel. Die praktische Konsequenz: bei der angegebenen Höchstgeschwindigkeit läuft der Controller unter Idealbedingungen mit 85-95% PWM. PWM ist die Reserve, die der Controller hat, um dich im Gleichgewicht zu halten - bei 90% bleiben 10% für eine Bodenwelle oder einen Windstoß. Bei 100% bleibt keine Reserve mehr, um das Pendel zu stabilisieren. Das ist kein geplanter Cutoff; praktisch endet es als Overpower, Overlean oder Faceplant.
Fünf Variablen fressen diese Reserve in dem Moment, in dem du das Labor verlässt:
- Fahrergewicht. Schwererer Fahrer, mehr Strom, mehr Spannungseinbruch, höheres PWM bei gleicher Geschwindigkeit
- Akkustand. Niedriger SoC bedeutet niedrigere Ruhespannung und schlechterer Einbruch unter Last. Höheres PWM nötig, um die gleiche Geschwindigkeit zu halten
- Temperatur. Kalte Zellen haben höheren Innenwiderstand. Mehr Einbruch. Höheres PWM
- Zellenalter. Ein Akku bei 15.000 km (9.320 mi) sackt härter ab als ein frischer. Gleiche Geschwindigkeit, mehr verbrauchte Reserve
- Steigung und Wind. Bergauf oder Gegenwind erhöhen die Motorlast bei gleicher Geschwindigkeit. Gleiche PWM-Rechnung
Das addiert sich. Dieselbe Geschwindigkeit kann im Juni mit warmem, frischem Akku unkritisch sein und im Winter mit niedrigerem SoC, älterem Pack und Gegenwind riskant werden. Dein Tacho zeigt immer noch deine normale Reisegeschwindigkeit, aber der Controller kann 20+ Prozentpunkte über deinem PWM-Baseline laufen. Du fährst viel näher an der Kante, als du denkst.
Methode 1: Die 80%-Regel
Null Werkzeuge. Funktioniert für jeden auf jedem Wheel.
Nimm die vom Hersteller angegebene Höchstgeschwindigkeit. Multipliziere mit 0.8. Fahre dort oder darunter.
- Wheel gibt 85 km/h (53 mph) an → Reise bei oder unter 68 km/h (42 mph)
- Wheel gibt 70 km/h (43 mph) an → Reise bei oder unter 56 km/h (35 mph)
- Wheel gibt 95 km/h (59 mph) an → Reise bei oder unter 76 km/h (47 mph)
Ungefähr, aber dramatisch besser als der Spec direkt zu vertrauen. Nutze das, wenn du ohne App fährst oder einfach eine mentale Obergrenze willst. Für schwerere Fahrer (100+ kg / 220+ lbs), Bergterrain oder kalte Winter: runter auf 70% statt 80%.
Methode 2: PWM-Überwachung in einer App
Die echte Methode. Gibt dir eine Zahl, die an deine echte Fahrt gebunden ist, nicht ans Labor.
Setup:
- Installiere EUC World, WheelLog oder DarknessBot
- Verbinde dein Wheel via Bluetooth
- Öffne das Live-Dashboard mit sichtbarem PWM
- Setze einen Safety-Margin-Alarm. Konservatives Ziel: Alarm bei anhaltenden 80% PWM
Wie du es nutzt:
Fahre deine normalen Strecken in deinen normalen Geschwindigkeiten. Beobachte anhaltendes PWM - den stabilen Wert nachdem du eine Geschwindigkeit für 5+ Sekunden gehalten hast, nicht den Spike während der Beschleunigung.
- Unter 70% anhaltendes PWM - viel Reserve. Sicheres Reise-Territorium
- 70-80% anhaltendes PWM - die weiche Obergrenze. OK für kurze Bursts, nicht zum Cruisen
- Über 80% anhaltendes PWM - abnehmender Ertrag. Jeder zusätzliche km/h kostet echte Reserve
- Alarm geht los - langsamer werden. Nicht diskutieren
Deine Reisegeschwindigkeit ist die schnellste Geschwindigkeit, bei der du in deinen schlechtesten erwarteten Bedingungen (kalt, niedriger Akku, älterer Pack) unter 70% PWM bleibst. Nicht in deinen besten.
Methode 3: Persönliche PWM-Kurve
Für Fahrer, die die echten Daten wollen. Eine fokussierte Session und du kennst deine Zahl.
Bedingungen:
- Akku bei 60-80% (Mitte, nicht frisch vom Ladegerät)
- Leere, gerade, ebene Straße ohne Wind
- Volle Schutzausrüstung - das ist ein High-Speed-Test
- Logging aktiviert in EUC World, WheelLog oder DarknessBot (CSV-Export)
Protokoll:
Fahre mit konstanter Geschwindigkeit durch einen stabilen Cruise von 10+ Sekunden bei jedem Zielwert. Erfasse PWM während des stabilen Teils, nicht während der Beschleunigung. Wiederhole 3× bei jeder Geschwindigkeit und mittele.
Zielgeschwindigkeiten: 30, 40, 50, 60, 70 km/h (19, 25, 31, 37, 43 mph) - und höher, wenn dein Wheel das angibt und du die Skills hast.
Was du bekommst:
Trage Geschwindigkeit gegen durchschnittliches PWM in beliebigen Tabellenkalkulationen auf. Du siehst eine Kurve, die bei niedrigen Geschwindigkeiten relativ flach bleibt, dann an einem Punkt steil ansteigt. Dieser Wendepunkt ist deine Basisdrehzahl - der Beginn der Feldschwächung für deine spezifische Fahrer-plus-Wheel-Kombination.
Deine Reiseobergrenze: die Geschwindigkeit, bei der die Kurve 70% PWM überschreitet. Das ist deine echte Reisezahl unter aktuellen Bedingungen.
Wiederhole das gleiche Protokoll bei 30% Akku, an einem kalten Morgen, oder mit einem 10 kg (22 lbs) beladenen Rucksack, und die Kurve verschiebt sich nach links. Diese Verschiebung ist die Lücke zwischen Datenblatt und Realität, sichtbar gemacht.
Kein PWM in deiner App?
Einige Wheels melden PWM nicht über Bluetooth, und einige Apps legen es nicht offen. Wenn dein Wheel oder deine App so arbeitet, nutze stattdessen die Leistungsaufnahme. Die Leistung steigt am selben Wendepunkt wie PWM - das ist dieselbe Physik durch ein anderes Fenster gesehen. Trage Geschwindigkeit auf X, mittlere Leistung in W auf Y auf. Suche den Punkt, an dem die Kurve sichtbar schneller steigt. Setze deine Obergrenze 5-10 km/h darunter. Methode identisch. Daten nur weniger direkt.
Worked Example - wie die Kurve tatsächlich aussieht
Hier ist, was eine Session von Methode 3 produziert. Sechs Durchläufe derselben 3,2 km städtischen Runde, 110 kg Fahrer, Extreme Bull GT PRO+ (168V, Samsung 50S), 2-Sekunden-Samples von EUC World. Geschwindigkeit auf X, mittlere Leistung pro 2-km/h-Bin auf Y, mit dem Bereich zwischen dem 25. und 75. Perzentil schattiert, damit du das Rauschen siehst.
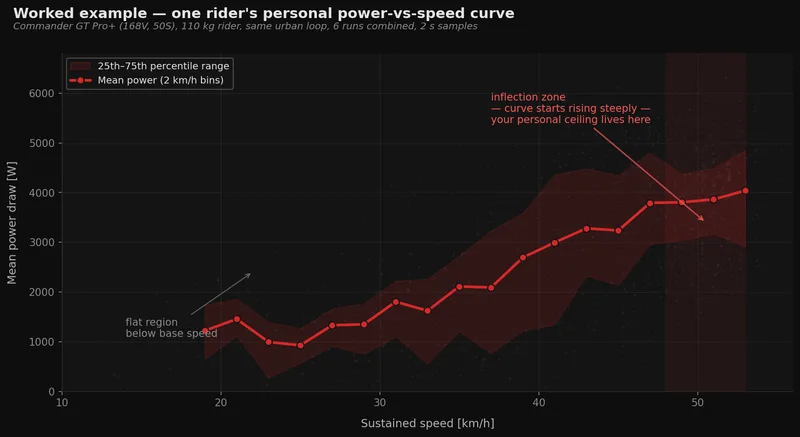
Was daraus abzulesen ist. Von 20 bis 45 km/h klettert die mittlere Leistung graduell - etwa 90 W pro zusätzlichen km/h. Das ist der flache Bereich. Du bist weit unter der Basisdrehzahl; der Motor hat reichlich Spannungsreserve, Feldschwächungsstrom ist minimal, und jeder zusätzliche km/h kostet etwa das, was die Widerstandsphysik vorhersagt. Ab 47 km/h aufwärts beginnt sich die Steigung zu ändern. Das IQR-Band wird breiter. Einzelne Samples streuen mehr. Das ist der Controller, der anfängt härter zu arbeiten - Feldschwächung beginnt einzusetzen, Spannungssag verstärkt sich bei Beschleunigungsspikes, Back-EMF nähert sich der Akkuspannung.
Für diesen Fahrer auf diesem Wheel liegt die sichere Reiseobergrenze bei etwa 52 km/h - unter der Wendezone, mit Reserve. Die vom Hersteller angegebene Höchstgeschwindigkeit beträgt 200 km/h (off-road free spin) oder 257 km/h (racing free spin). Die 80%-Regel auf die angegebene Maximalgeschwindigkeit würde 160 km/h ergeben. Die echte Zahl, gemessen am tatsächlichen Wheel, ist weniger als ein Drittel davon.
Ein ehrlicher Vorbehalt. Auf diesem Wheel, bei den Geschwindigkeiten, die dieser Fahrer erreichte (max ~55 km/h), ist der Wendepunkt mild. Es ist keine plötzliche Klippe im Diagramm, sondern der Punkt, an dem die Leistung schneller zu steigen beginnt als zuvor. Der Fahrer drückte nicht tief genug in die Feldschwächung, um eine scharfe Wende zu produzieren - was auf diesem 168V-Wheel ein Cruisen bei 65-75 km/h erfordern würde. Das ist okay. Die Methode funktioniert trotzdem: finde die Geschwindigkeit, bei der deine Kurve beginnt, vom graduellen frühen Slope abzuweichen, und setze dich 5-10 km/h darunter. Auf einem Wheel mit niedrigerer Spannung (134V, 126V), oder mit einem schwereren Fahrer, oder bei niedrigerem SoC, ist die Wende schärfer und erscheint früher. Ein Fahrer auf einem 134V-Wheel, der dasselbe Protokoll ausführt, würde wahrscheinlich einen deutlichen Wendebereich bei 40-45 km/h sehen statt einer sanften Biegung oberhalb von 50 km/h.
Warum die meisten Reviewer das nicht veröffentlichen
Logging-Sessions bei hohen Geschwindigkeiten auf unbekannten Wheels sind gefährlich. Drei saubere Runs bei jeder Geschwindigkeit für eine zuverlässige Kurve sind ein voller Arbeitstag. Sponsoren wollen nicht “meine Einheit lief bei 89% PWM am angegebenen Max, cruised da nicht” in einem Video. Zuschauerbindung bevorzugt “let’s send it” über Scatter-Plots. Das Ergebnis: du siehst “massig Power bei 75 km/h (47 mph), fühlte sich super smooth an” von einem Reviewer, der bei 70 kg (154 lbs) mit vollem Akku auf geschlossener Strecke getestet hat, und extrapolierst auf deinen 95 kg (209 lbs) Arbeitsweg bei 40% Akku in der Kälte. Der Reviewer lügt nicht. Die Extrapolation ist das Problem.
555 take
Die Höchstgeschwindigkeit auf deinem Datenblatt ist ein technischer Datenpunkt, keine Fahrempfehlung. Es ist die Obergrenze dessen, was das Wheel jemals geschafft hat, nicht deine persönliche Grenze.
Fang mit der 80%-Regel an. Wenn du ernsthaft fährst, steige auf PWM-Überwachung um. Wenn du tatsächlich wissen willst, wo deine Kante ist, fahre die Kurve einmal. Zehn Minuten Messung schlagen ein Jahr Raten.
Deine echte Reisegeschwindigkeit ist niedriger als die Box verspricht und sie ändert sich. Das Wheel, das im Juni bei 80% Akku sicher bei 70 km/h (43 mph) ist, kann im Januar bei 40% bei 65 km/h (40 mph) an der Kante sein. Check. Nimm nichts an.